A series of ds18S20 and ds18B20 of digital temperature sensor uses 1-wire bi-directional protocol to request and receive temperature data. DS18S20 has 9-bit resolution while ds18B20 has 12-bit resolution.
In this project I create a system that follow these operations:
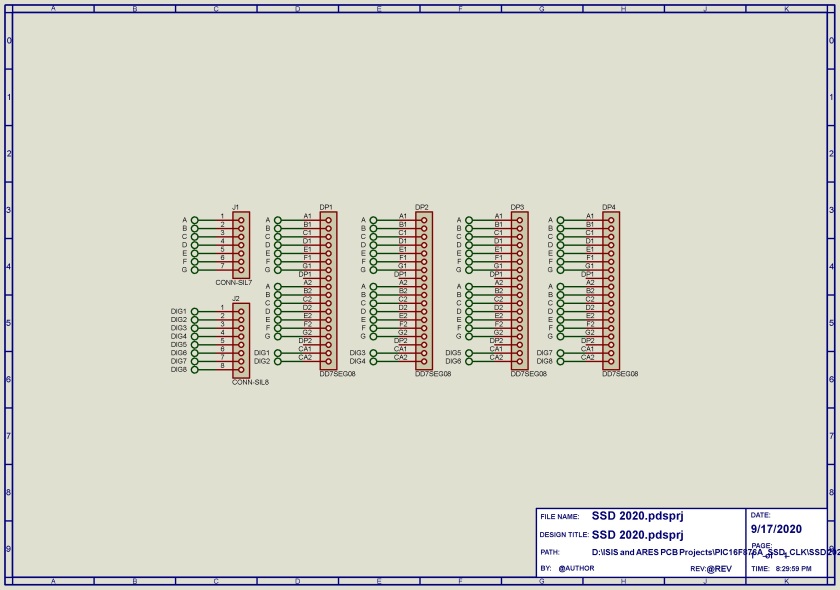
- The CPU reads temperature data and display it on a MUX SSD.
- A two-switch input uses to set the temperature for turning relay on/off.
- Each time I set the temperature, the CPU save that setting to the EEPROM
- Anytime the current temperature exceeds the setting, the relay works.
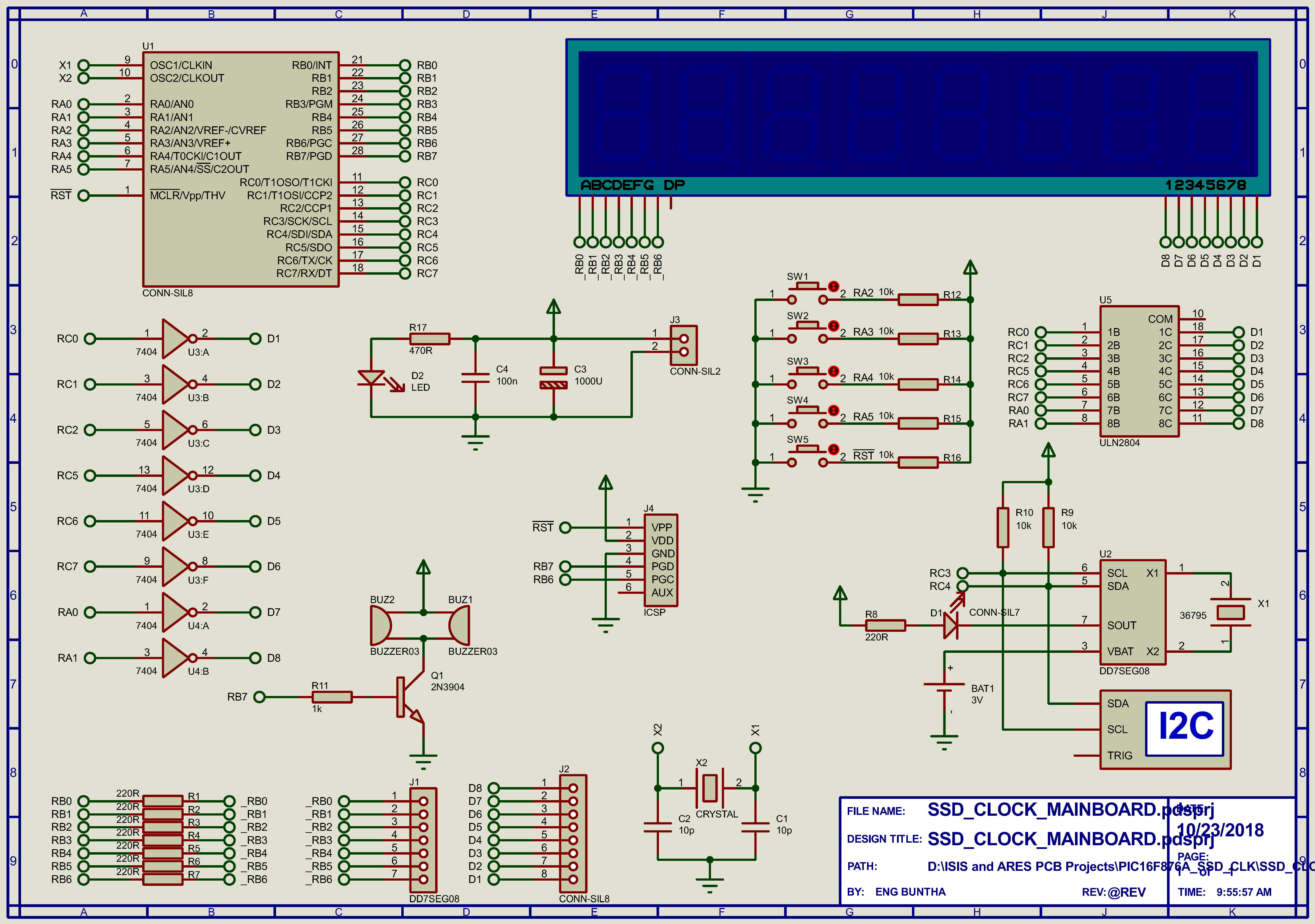
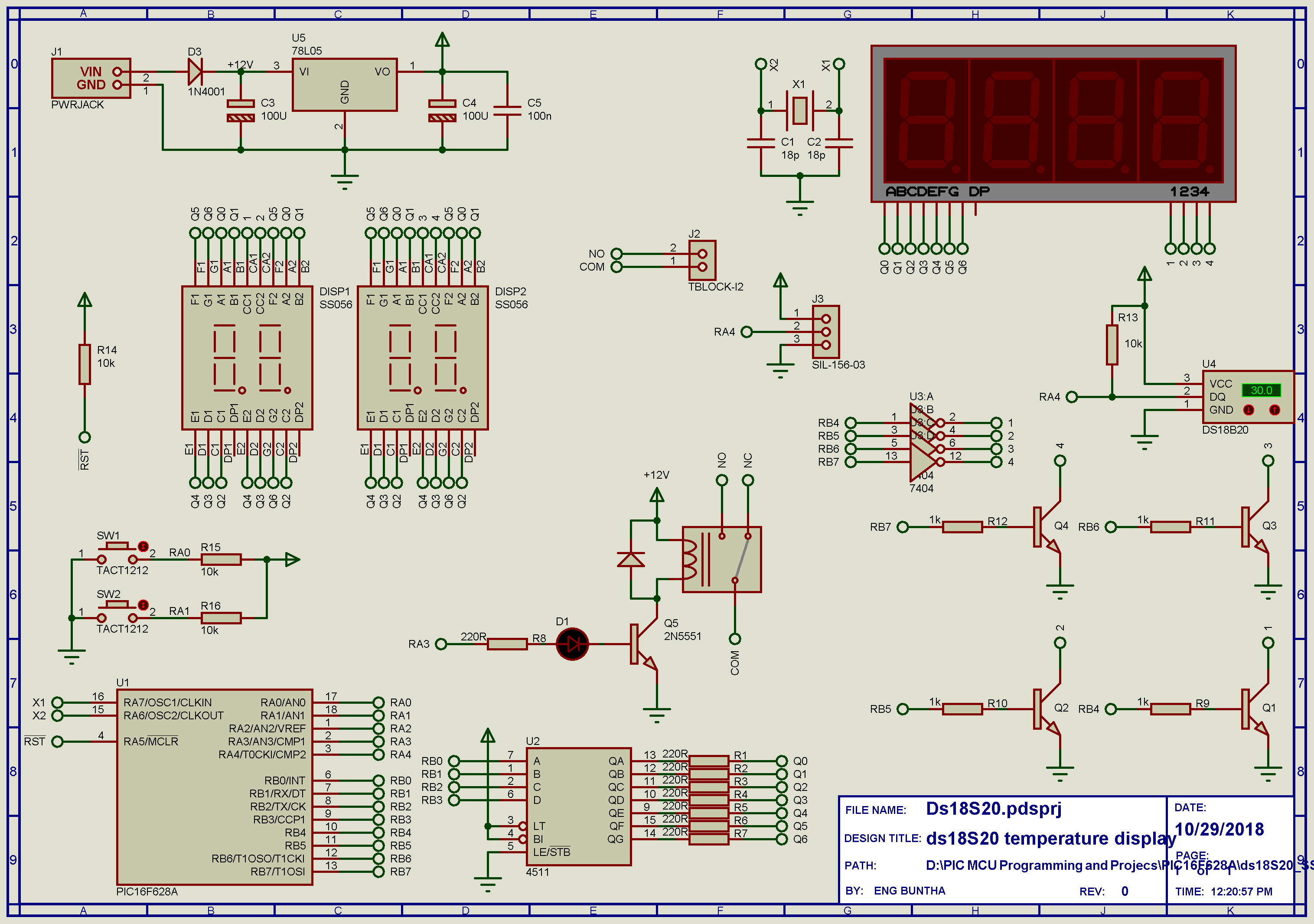
The design is controlled by a PIC16F628A/PIC16F84A CPU. The inputs are: ds18X20 and input tactile switches. The outputs are a SPDT relay and a four-digit MUX SSD that I posses. I use an extra 4511 BCD to SSD decoder that I left. The system is powered by a +12V maximum AC/DC input to a regulated +5V/100mA 78L05 voltage stabilizer.
The firmware is written using MikroC pro for 8-bit PIC. The schematic capture and simulation is made using Proteus VSM 8.
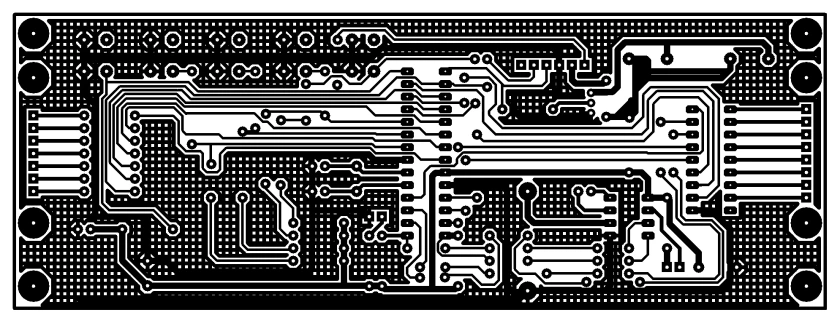
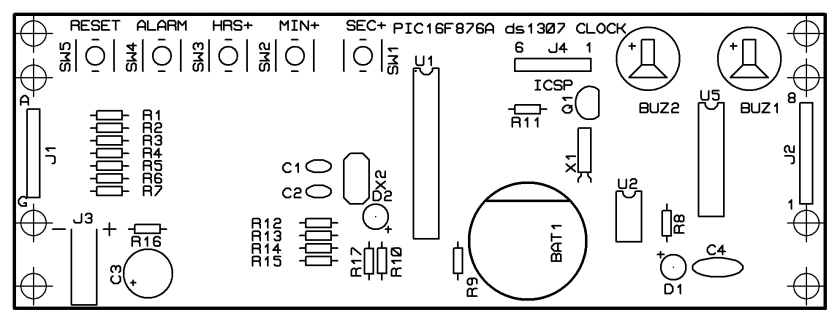
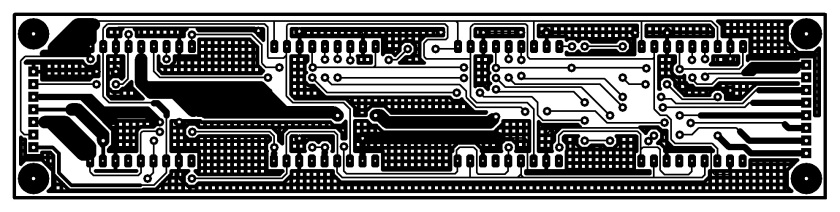
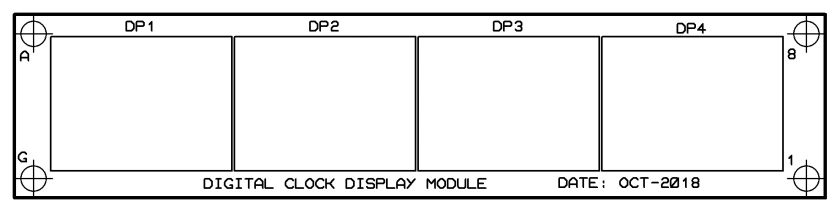
I made my own PCB with in-house components. For more high quality PCB, choosing a PCB supply service could be a good option.
Project galleries:





Project archive:
https://github.com/BongPeav/MikroC-8-bit-PIC/raw/master/ds18S20_SSD_CON.rar
MikroC source code for this project:
#define INC PORTA.RA0
#define DEC PORTA.RA1
#define RLY PORTA.RA3
unsigned char T0Cnt,setTemp,setRead;
// Set TEMP_RESOLUTION to the corresponding resolution of used DS18x20 sensor:
// 18S20: 9 (default setting; can be 9,10,11,or 12)
// 18B20: 12
const unsigned short TEMP_RESOLUTION = 12;
unsigned Cnt1,Cnt2,Cnt3,Cnt4;
bit minus,ssdOn;
void interrupt(void){
asm{
CLRWDT
}
if(INTCON.T0IF==1){
T0Cnt++;
INTCON.T0IF=0;
}
}
void ioInit(void);
void ssdOut(unsigned int temp);
void tempRead(void);
unsigned int gettemp();
void tempSet(void);
void dataRead(void);
void main() {
unsigned tempData,oldData;
ioInit();
dataRead();
tempData=getTemp();
tempData=0;
delay_ms(20);
oldData=0;
while(1){
if(ssdOn==1){
if(Cnt1>=75){
tempData=getTemp();
tempData=getTemp();
Cnt1=0;
}
ssdOut(tempData);
}
else
ssdOut(setTemp);
tempSet();
if(Cnt4>=50){
if(tempData>=setTemp) {
RLY=1;
Cnt4=0;
}
else {
RLY=0;
Cnt4=0;
}
}
}
}
void ssdOut(unsigned int temp){
char ssd[10]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90};
char d1,d2,d3;
d1=temp/100;
d2=(temp%100)/10;
d3=temp%10;
switch(T0Cnt){
case 2 :
PORTB=0x00;
PORTB=d1&0x0F;
PORTB|=0x20;
break;
case 3 :
PORTB=0x00;
PORTB=d2&0x0F;
PORTB|=0x40;
break;
case 4 :
PORTB=0x00;
PORTB=d3&0x0F;
PORTB|=0x80;
break;
case 5 :
Cnt1++;
Cnt2++;
CNt3++;
Cnt4++;
T0Cnt=0;
break;
}
}
void ioInit(void){
PCON.OSCF=1;
TRISB=0x00;
TRISA=0x03;
CMCON=0x07;
PORTA=0x00;
OPTION_REG=0x03; // 1:16
INTCON.GIE=1;
INTCON.T0IE=1;
INTCON.T0IF=0;
PORTB=0x00;
T0Cnt=0;
Cnt1=0;
Cnt2=0;
Cnt3=0;
Cnt4=0;
minus=0;
ssdOn=1;
}
unsigned int gettemp(){
unsigned int temp;
const unsigned short RES_SHIFT = TEMP_RESOLUTION - 8;
Ow_Reset(&PORTA, 4); // Onewire reset signal
Ow_Write(&PORTA, 4, 0xCC); // Issue command SKIP_ROM
Ow_Write(&PORTA, 4, 0x44); // Issue command CONVERT_T
Delay_us(120);
Ow_Reset(&PORTA, 4);
Ow_Write(&PORTA, 4, 0xCC); // Issue command SKIP_ROM
Ow_Write(&PORTA, 4, 0xBE); // Issue command READ_SCRATCHPAD
temp = Ow_Read(&PORTA, 4);
temp = (Ow_Read(&PORTA, 4) << 8) + temp;
if(temp&0x8000){
minus=1;
temp=~temp;
}
else
minus=0;
temp = temp >> RES_SHIFT ;
return temp;
}
void tempSet(void){
if(DEC==0&&Cnt2>=10){
ssdOn=0;
if(setTemp<120) setTemp++;
EEPROM_Write(0x00,setTemp);
Cnt3=0;
Cnt2=0;
}
if(INC==0&&Cnt2>=10){
ssdOn=0;
if(setTemp<120) setTemp--;
EEPROM_Write(0x00,setTemp);
Cnt3=0;
Cnt2=0;
}
setRead=setTemp;
if(Cnt3>=150) {
ssdOn=1;
Cnt3=0;
}
}
void dataRead(void){
setTemp=EEPROM_Read(0x00);
}
For any custom design relates to this project, you can contact the author.